Un equipo de investigadores del Robotics Institute de la Universidad Carnegie Mellon ha desarrollado una innovadora tecnología sensorial llamada SonicBoom, que promete cambiar de manera radical la forma en que los robots agrícolas detectan cultivos como las manzanas. A diferencia de los métodos tradicionales basados en cámaras, este sistema utiliza el sonido como herramienta principal para localizar y reconocer los frutos, incluso cuando están ocultos entre el follaje.
Aunque aún se encuentra en una fase temprana de desarrollo, SonicBoom podría, a medio plazo, facilitar tareas como la poda automatizada de viñedos o la identificación de fruta madura que permanece fuera del alcance visual de los sensores ópticos.
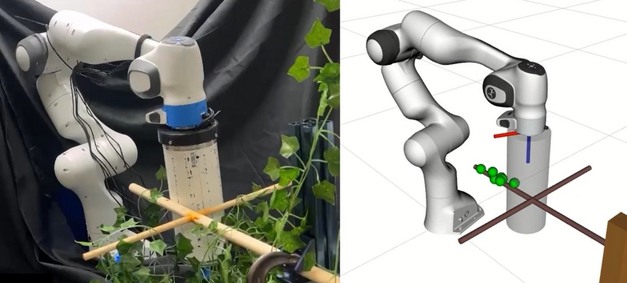 © Carnegie Mellon University
© Carnegie Mellon University
El doctorando en robótica Moonyoung (Mark) Lee explica que esta tecnología es capaz de percibir la forma tridimensional de los objetos mediante el tacto, sin necesidad de cámaras. Esto representa un gran avance frente a los problemas comunes de los sensores visuales en entornos agrícolas, donde la densa vegetación suele bloquear tanto la visibilidad de la fruta como el acceso de los brazos robóticos.
A diferencia de los sensores táctiles convencionales, SonicBoom emplea micrófonos de contacto que registran las vibraciones generadas al tocar un objeto. Esta alternativa no solo es más resistente que los sensores ópticos —a menudo frágiles—, sino también más rentable que los sensores de presión, que resultan caros y complejos de desplegar a gran escala. Además, los micrófonos pueden resguardarse en carcasas protectoras para resistir las duras condiciones del campo.
El prototipo actual consiste en seis micrófonos de contacto montados dentro de un tubo de PVC. Cuando dicho tubo entra en contacto con una superficie —por ejemplo, una rama—, los micrófonos captan las vibraciones generadas y el sistema determina con gran precisión (entre 0,43 y 2,2 centímetros) el punto exacto de contacto. La carcasa de PVC, además, protege el mecanismo de daños externos.
Para entrenar el sistema, el equipo recopiló datos de 18.000 interacciones entre el sensor y una vara de madera. Luego, mediante un modelo de aprendizaje automático, lograron traducir las señales acústicas en ubicaciones precisas. Si bien la versión actual está pensada para detectar objetos duros o rígidos, con algunos ajustes podría adaptarse para identificar objetos blandos, como frutas.
Lee también señala que el equipo está investigando nuevas aplicaciones del sistema, como la identificación de objetos, además de su localización. Estas capacidades podrían extenderse más allá del ámbito agrícola, como en sistemas de seguridad para robots colaborativos, aplicaciones robóticas para interacción humana, o incluso en entornos con baja iluminación.
El equipo de investigación está formado por Moonyoung (Mark) Lee, el profesor asociado Oliver Kroemer, el doctorando Uksang Yoo, y los profesores del Robotics Institute Jean Oh, Jeffrey Ichnowski y George Kantor.
Para más información:
Cassia Crogan
Carnegie Mellon University
Tel.: +1 412 268 2900 (EE. UU.)
[email protected]
www.cmu.edu